智能机器人研究中心(Institute of Robotics and Intelligent Machines, Guangxi University),由中科院百人计划双丰教授创建,依托“电气工程”一级学科博士点和“控制科学与工程”一级学科硕士点开展高水平科研及教学工作。研究中心位于yh86银河国际206和建院实训楼五楼,具备较完备的学习、科研环境和齐全的软硬件设施。中心现有科研教学人员13人,其中教授4人,副教授1人,讲师1人;博士生导师1人,硕士生导师6人,在读博士生5人,硕士生67人。
智能机器人研究中心主要面向机器人实用化、系列化、智能化,提高智能机器人自主性、适应性开展科学研究与技术开发,并培养创新型人才。主要研究方向有:
1.智能移动机器人
2.电力巡检机器人
3.仿生扑翼机器人
4.六足机器人
5.水上机器人
智能移动机器人
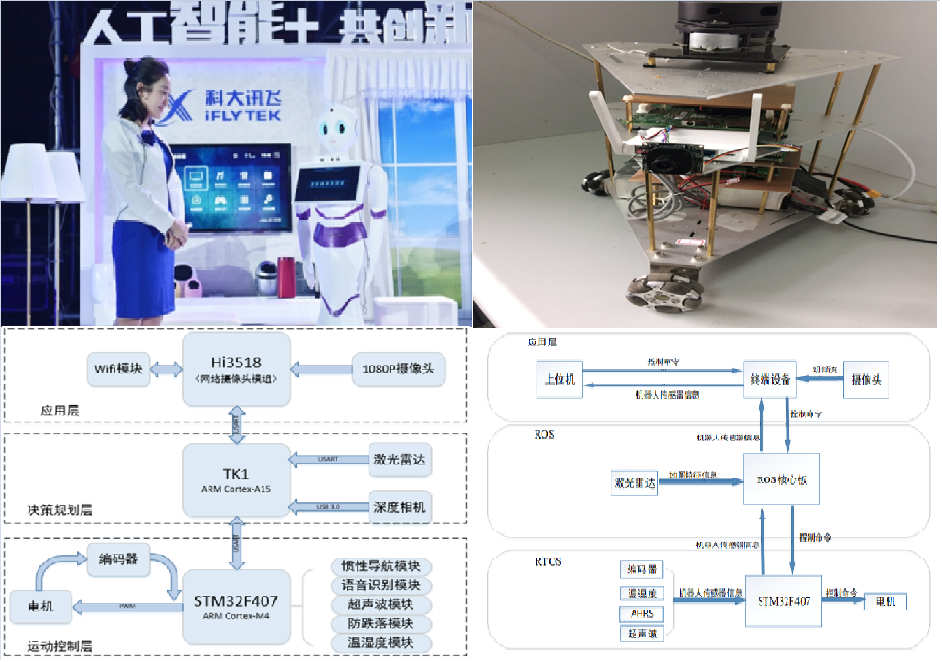
近些年来,伴随着人工智能技术、计算机与传感器技术、电子信息工程技术等新型技术的快速发展,智能机器人技术也得到了突飞猛进的发展,并迎来了产业化的黄金阶段。通信技术水平的提高推动了物联网技术的广泛应用,再次为机器人技术应用领域的发展注入新活力。物联网技术与机器人技术的相互融合,在智能家居、安防等领域表现出前所未有的巨大前景,将会成为机器人技术发展进步的一个比较大的发展趋势。
本实验室与科大讯飞联合研发的智能移动机器人解决了一些机器人定位与规划的关键问题,成功应用于讯飞的信息服务机器人。我们从机器人的物联网应用角度出发,设计了一套基于ROS机器人操作系统的移动机器人控制平台。所设计的平台融合了机器人技术与物联网技术,从而实现了两种关键技术的交叉融合与优势互补。机器人平台架构采用低耦合的分层控制理念,包括以物联网服务为核心的应用层、以机器人操作系统为核心的信息决策与处理层以及负责机器人运动控制的嵌入式底层,具有易于维护、低成本、可复用等优点。
电力巡检机器人
人工智能引领电力巡检科技创新,对存在高压、高危、复杂多变的工作场合,结合机器视觉、语音识别、激光测量等多传感技术手段,开发多自由度机械臂、巡检机器人、无人机等先进测控装置,并具有信息网络互联功能。
1.拥有自主巡航的精确引导停靠系统、停机坪、停机舱,为无人机在高楼或者杆塔上提供补能;
2.拥有机群统一实时管理平台,在补能站点的选址、巡检路径最优规划等方面开展研究工作;
3.自主巡航无限续能成为可能,在电力巡检以外的环境监测、农林遥测等其他发挥重要作用;

仿生扑翼机器人
自然界的鸟类(Bar-tailed godwit,斑尾塍鹬)可以不吃不喝8天8夜连续飞行一万多公里不停歇,yh86银河国际仿生机器人实验室的折叠翼扑翼机也可以利用自然界的风力,像帆船或者滑翔机一样长时间地留空,实现御风无动力飞行。与常见的飞行姿态更接近于昆虫或小型鸟类的单自由度扑翼机不同,折叠翼扑翼机飞行姿态更接近于大型鸟类,比如鹤类,鹈鹕,大型鹰科鸟类,结构复杂,空气动力学特征与鸟类更相似,飞行姿态更逼真,是目前最接近于真实鸟类飞行形态的扑翼机。yh86银河国际仿生机器人实验室的的折叠翼扑翼机可以实现主动式或被动式扭翼,最大限度地提高了整机的飞行效率。与此同时,利用我们自研地飞行控制系统还可以实现自主飞行,满足各种不同场合的需求。
yh86银河国际仿生机器人实验室由蔡毓博士于2016年创建,主要致力于仿生扑翼飞行器的研究,实验室现有硕士5人,本科生10人。拥有各种机械增材和减材加工设备,飞控系统,低速风洞,运动捕捉系统等设备。实验室拥有各种类型可稳定飞行的多自由度折叠翼飞行平台,也有单自由度的仿小型鸟及昆虫的飞行平台。
现场飞行视频可由此进

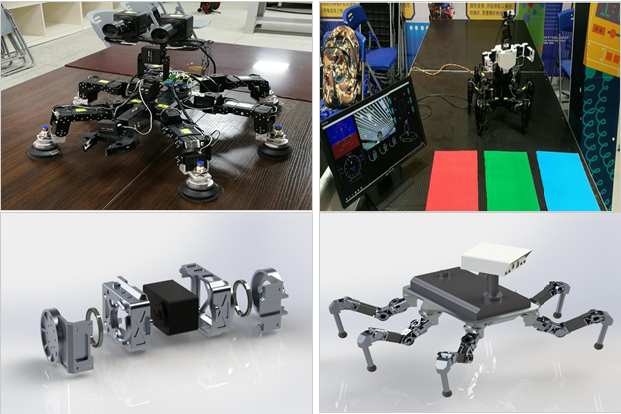
六足机器人
六足机器人又叫蜘蛛机器人,是多足机器人的一种。六足机器人第一代平台,定位为低成本的原理验证模型,基于自行搭配的外购成品零件,验证了基础性算法与功能应用,参与多项学生竞赛与展览活动,因平台限制已无继续开发价值,现用于学生相关应用能力培养。
第二代六足机器人平台定位为有较好性能的实验平台,全研发流程培养更多团队成员,高性能伺服舵机更高运动性能,标准化机电接口更大有效载荷,模块化设计理念更好升级与变形潜力。
水上机器人
无人船是借助精确卫星定位和自身传感即可按照预设任务在水面航行的全自动水上机器人,英文缩写为USV。现今,不少国家已开始研制无人船。一些船业巨头甚至乐观预测:也许只需几十年,发展成熟的“幽灵船”技术将改写全球远洋运输的面貌。
yh86银河国际水上机器人实验室研发的无人船使用先进的自动航行技术实现GPS自动导航,自动避障,自主航行。搭载先进的水质在线监测仪,可连续多监测点进行在线水质检测,并将检测数据实时发送回基站;能够实现多采样点、定时、定量全自动采样作业;具有水上和水下双摄像头,地面控制基站可实时接收无人船现场图像,显示并存储无人船数据信息、生成采样和监测工作报告,绘制该区域各水质参数分布图。


 科研平台
科研平台 当前位置:
当前位置: